Project Overview
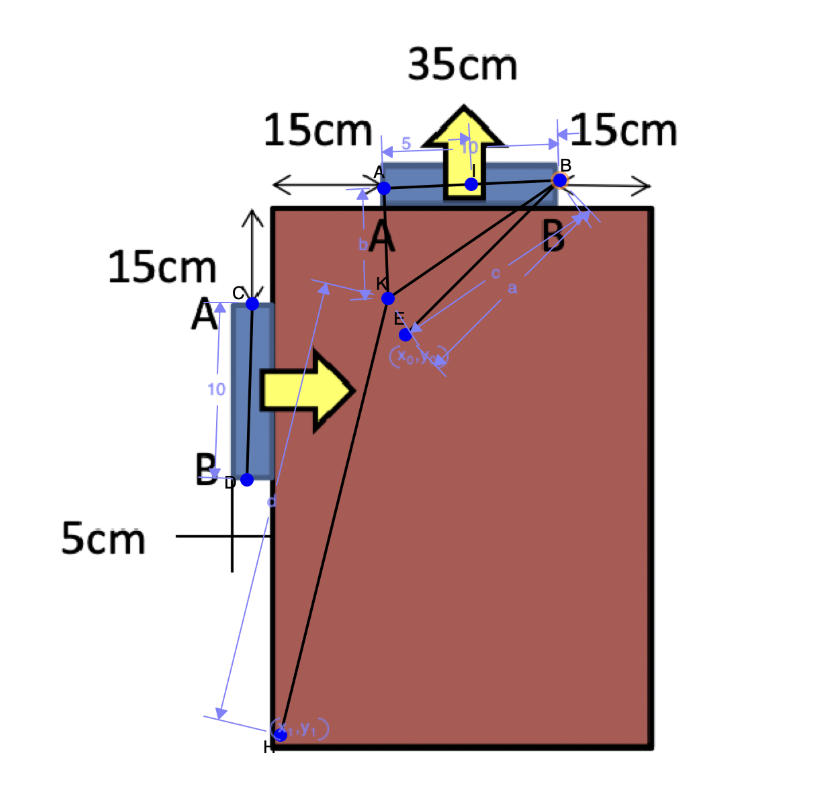
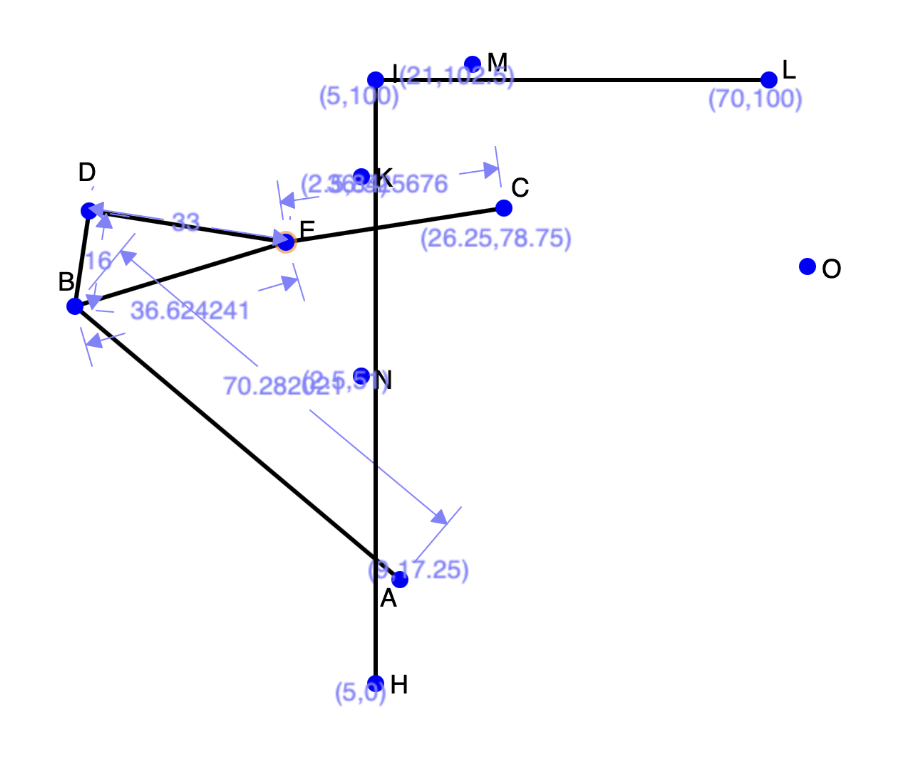
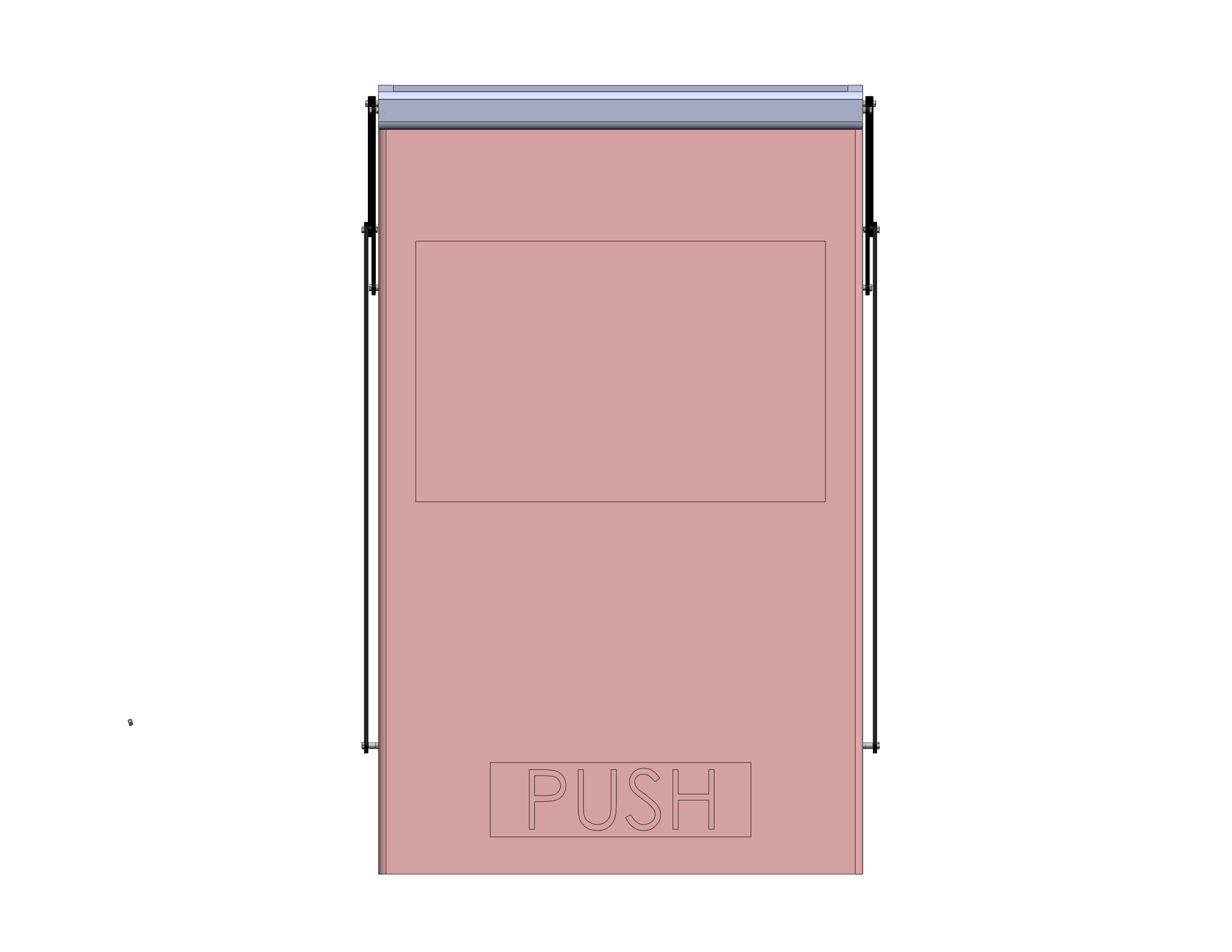
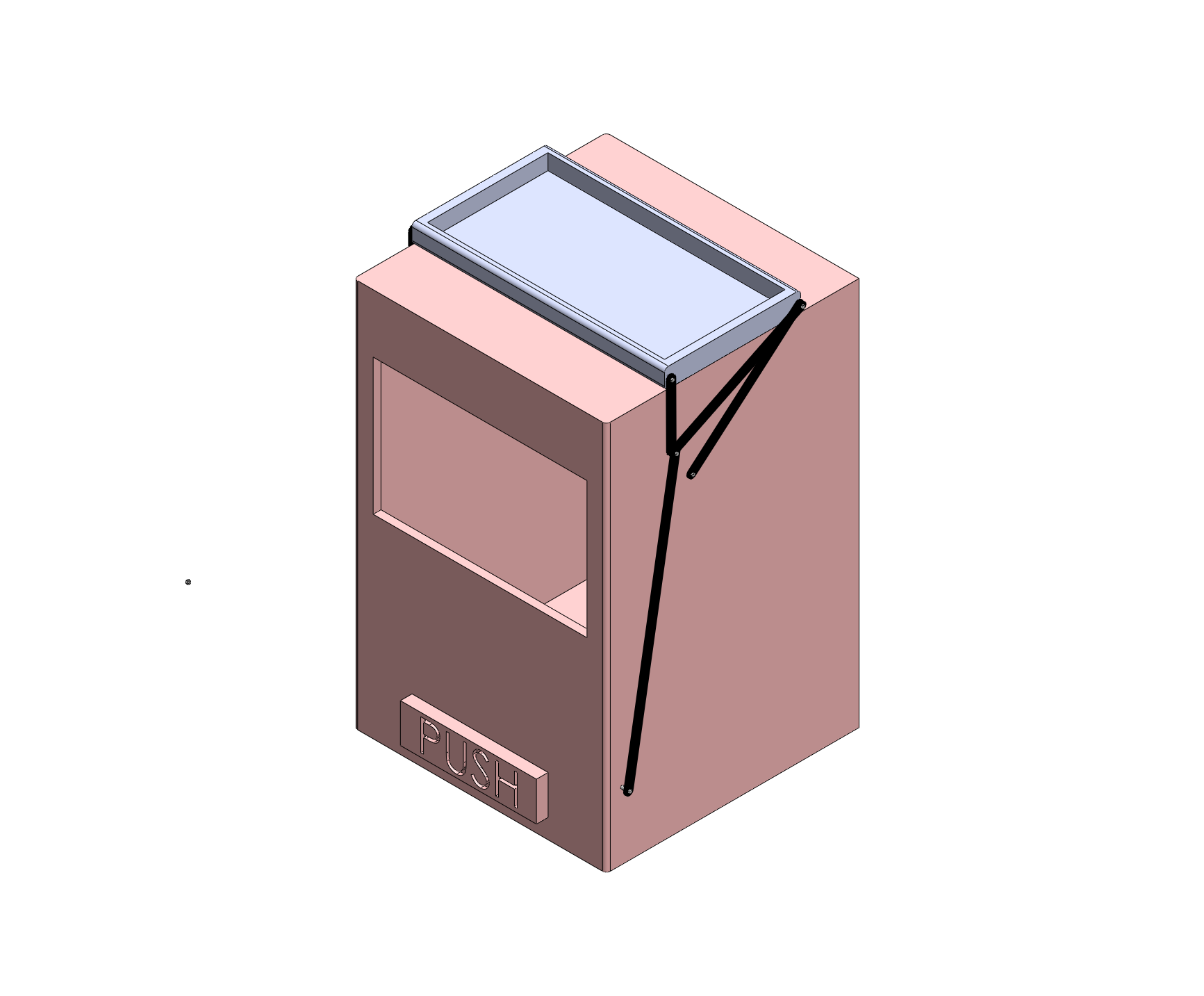
This project focused on designing a trash can mechanism to create controlled displacement motion. It involved CAD assembly, mechanism layout, and linkage-based motion design. The work emphasized how components interact and how motion can be clearly communicated through geometry and visuals.