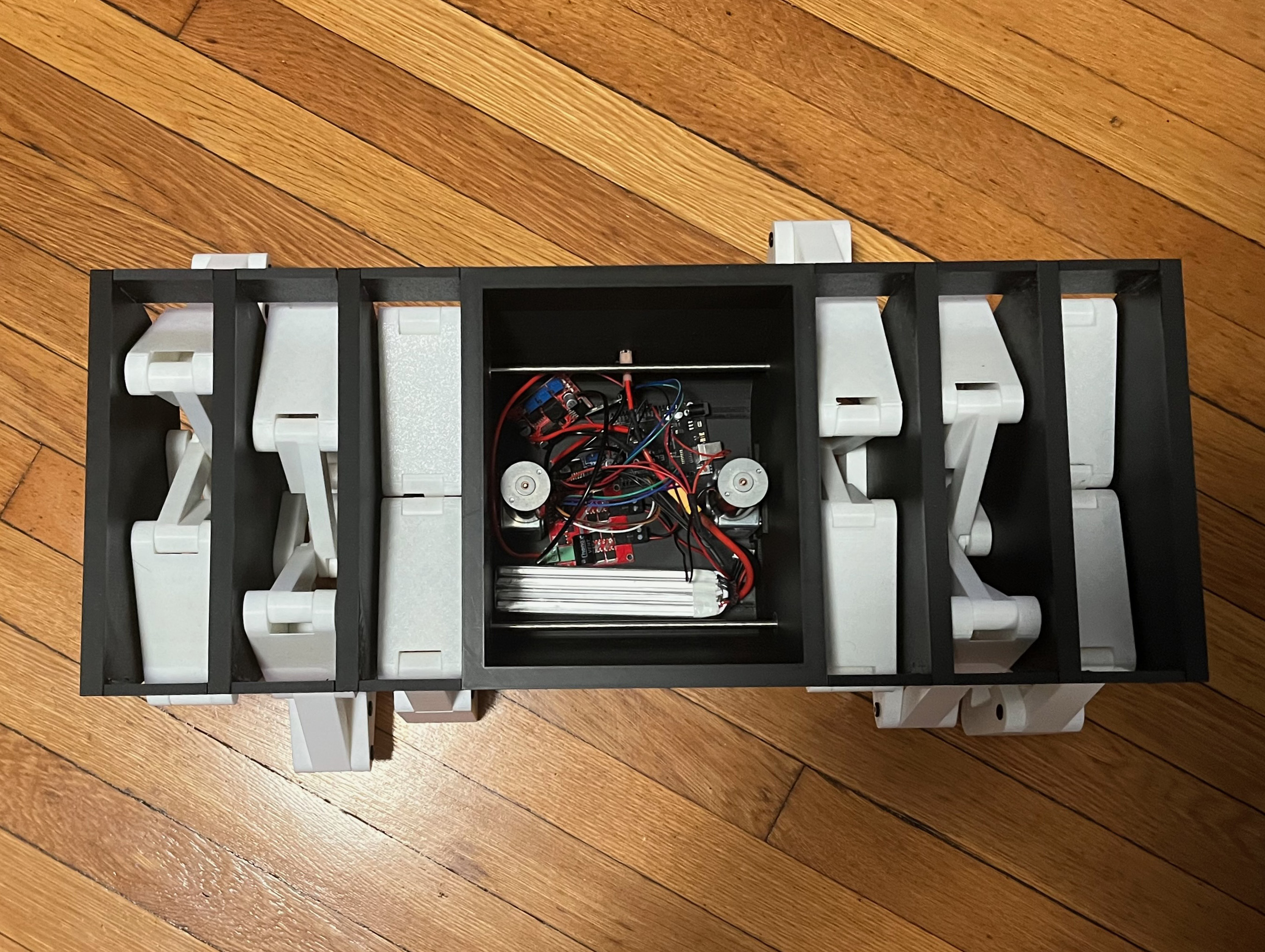
Project Overview
Strandbeest-inspired walking table using multi-linkage legs for smooth, stable motion. Driven by a tank-style motor system for controlled movement and steering. All components were 3D printed, with bearings and fasteners enabling low-friction linkage motion. The system is controlled via a Bluetooth joystick for real-time operation