Project Overview
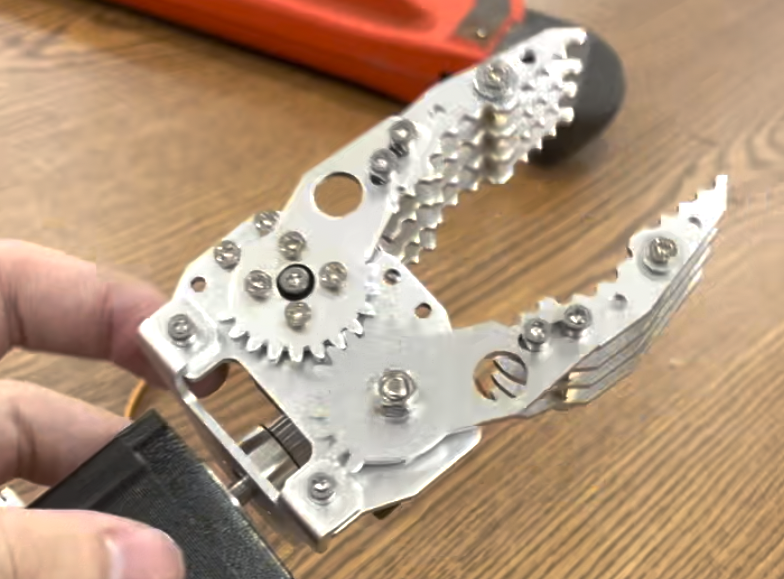
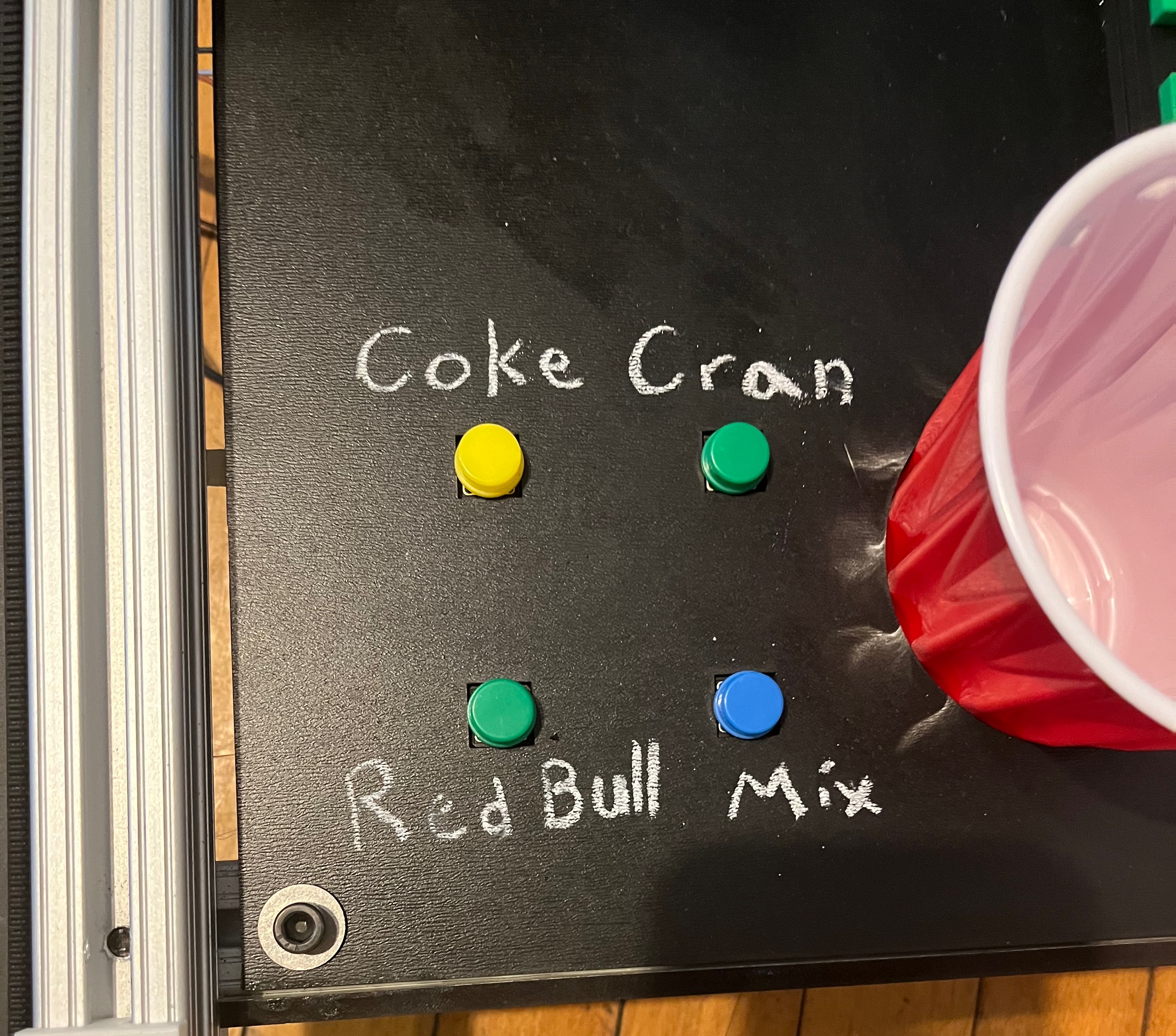
Automated drink-mixing prototype featuring a custom frame, slider, spinner, claw, and cup-holding mechanisms to position and dispense ingredients. The system provides 4.5 degrees of freedom with a claw end effector for controlled manipulation. Designed through CAD-based subsystem development, prototyping, and integration into a fully functional system.